

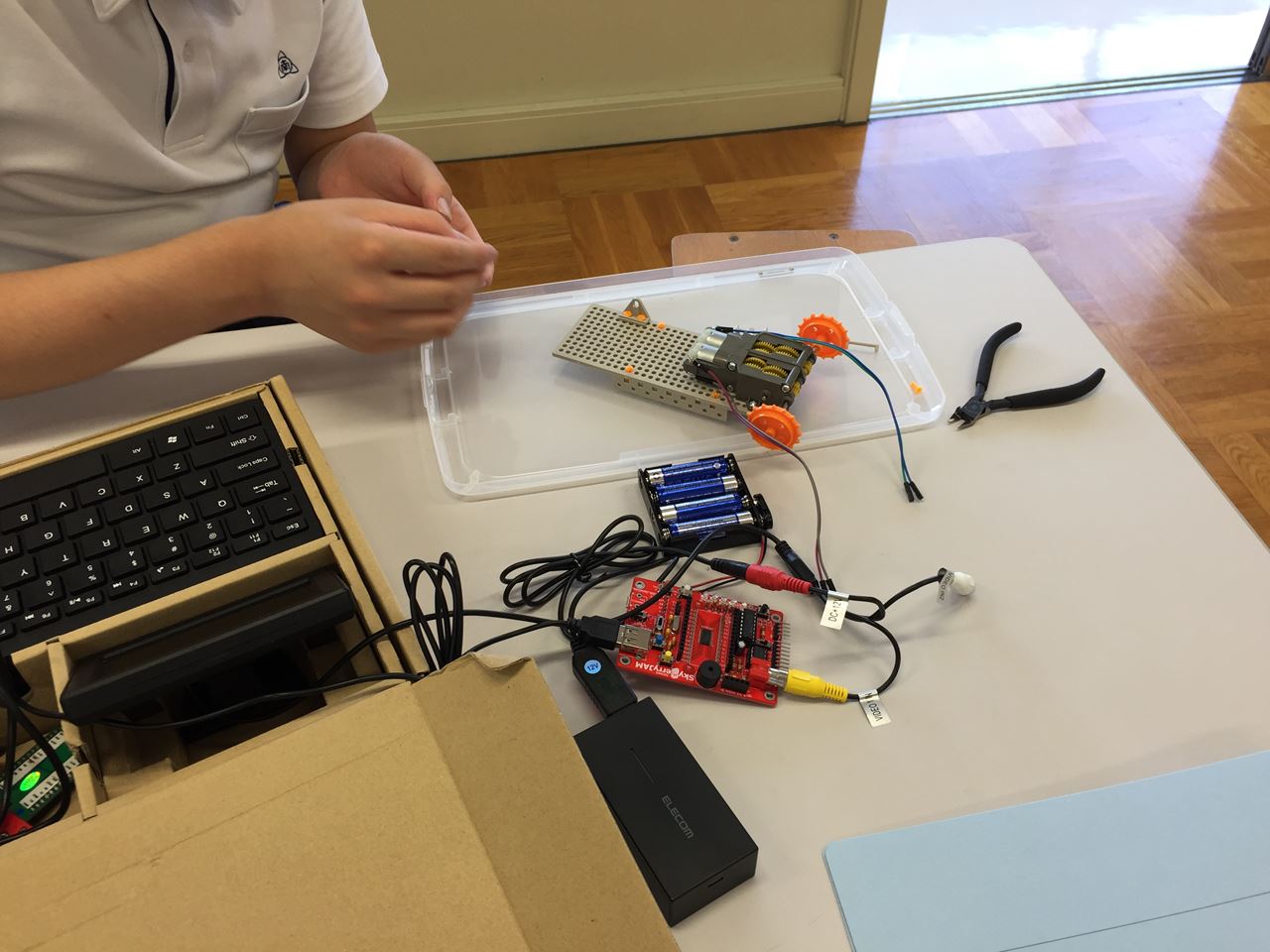
第3回目はいよいよロボット作り。一からロボットを作ることは大変なので、ロボットの土台になるプラスチックのプレート、足回りに利用するモーター・ホイール・キャタピラ、電池ボックスを準備しました。プラスチックの材料をニッパーで切り取っていきますが、バリが残ってしまったりと苦戦する様子も見られましたが、教師や周りの友達に切り方のこつを教えてもらったり、ネジをきつく締めるやり方を教わったりして、ロボットを組み立てていくことができました。

第4回 SkyberryJamを使って、モーターを動かしてみよう
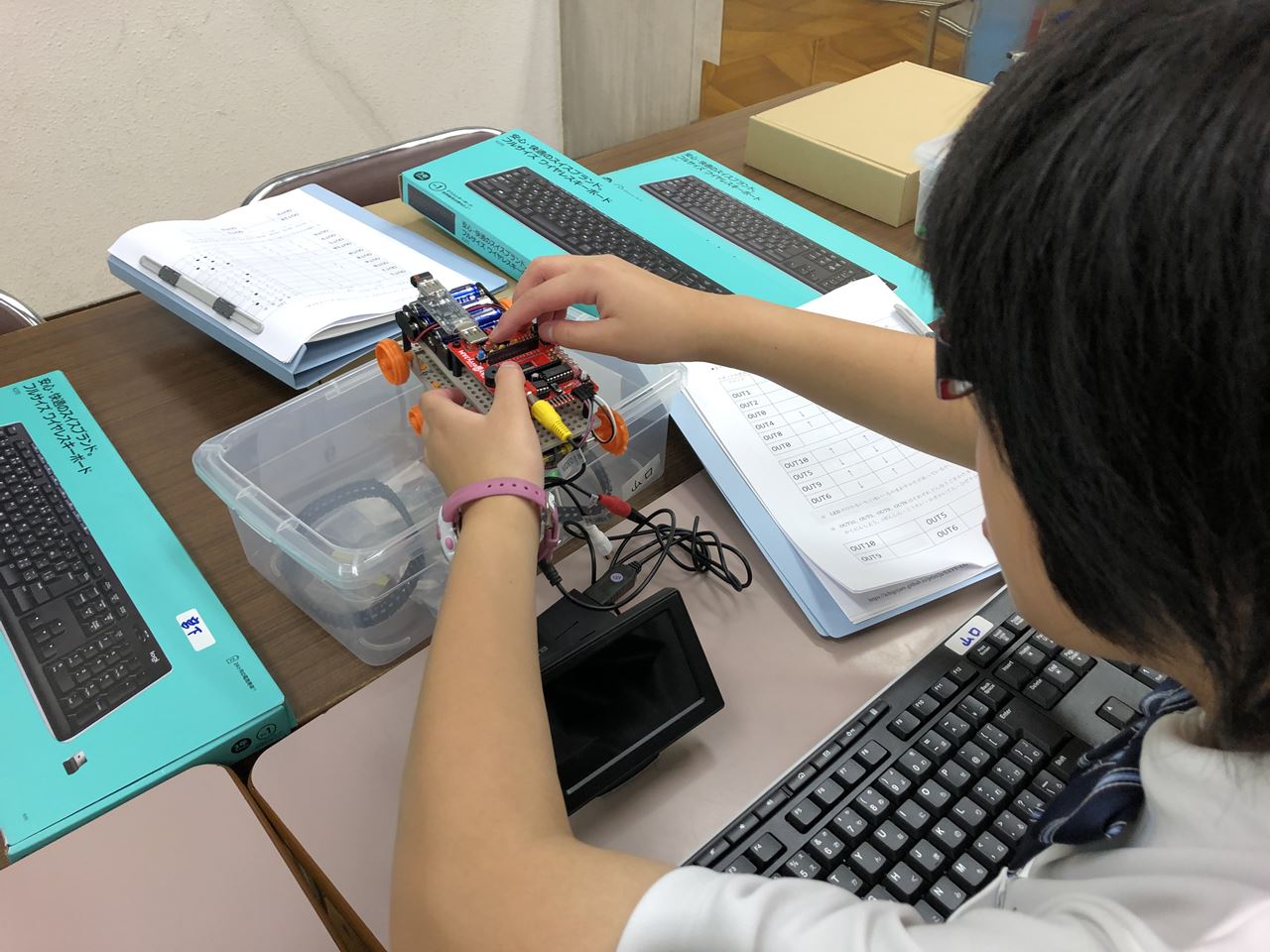
ロボットが出来上がっても、そのままでは動かすことができません。第4回目は、ロボットに指示を出すためのコンピュータを取り付けました。取り付けるコンピュータはSkyberryJamというIchigojamの互換機です。コンピュータにモータを動かすためのパーツもついており、ロボットの足回りのモーターも1台で動かせます。(SkybeeyJamは栃木工業高等学校の生徒さんが作られたものだそうです。)
モーターを動かすプログラミングをテスト。ロボットには左右に一つずつモーターが着いていて、OUTコマンドを使って、片輪ずつモーターを回し、うまくできたら、両輪のモーターを同時に回してみました。
全く、ホイールが回らない生徒もいて、とても焦る場面がありましたが、原因を探してみると、モーターを動かすためののスイッチがOFFになったままであったことを発見。スイッチをONにすると、無事にホイールが回り、「ああ、良かった」と安堵していました。

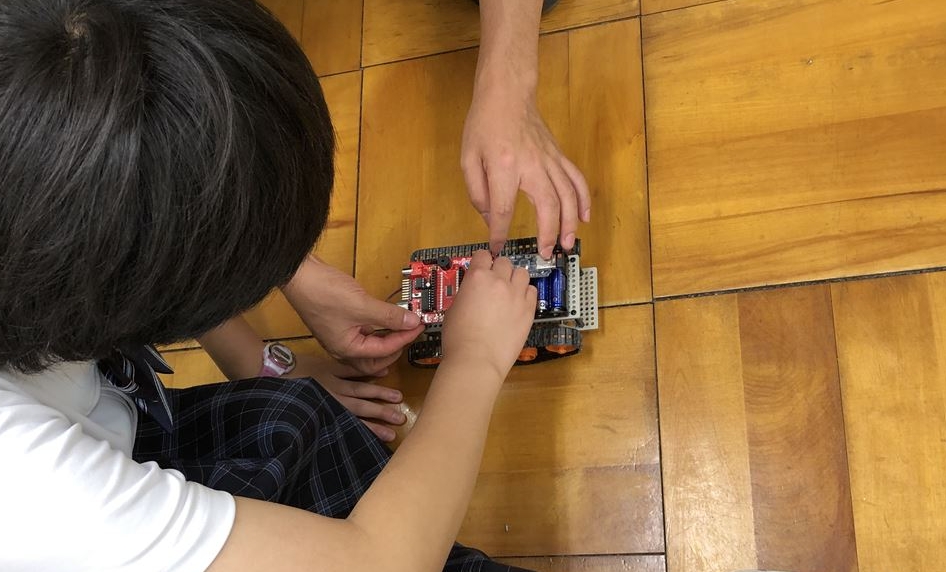
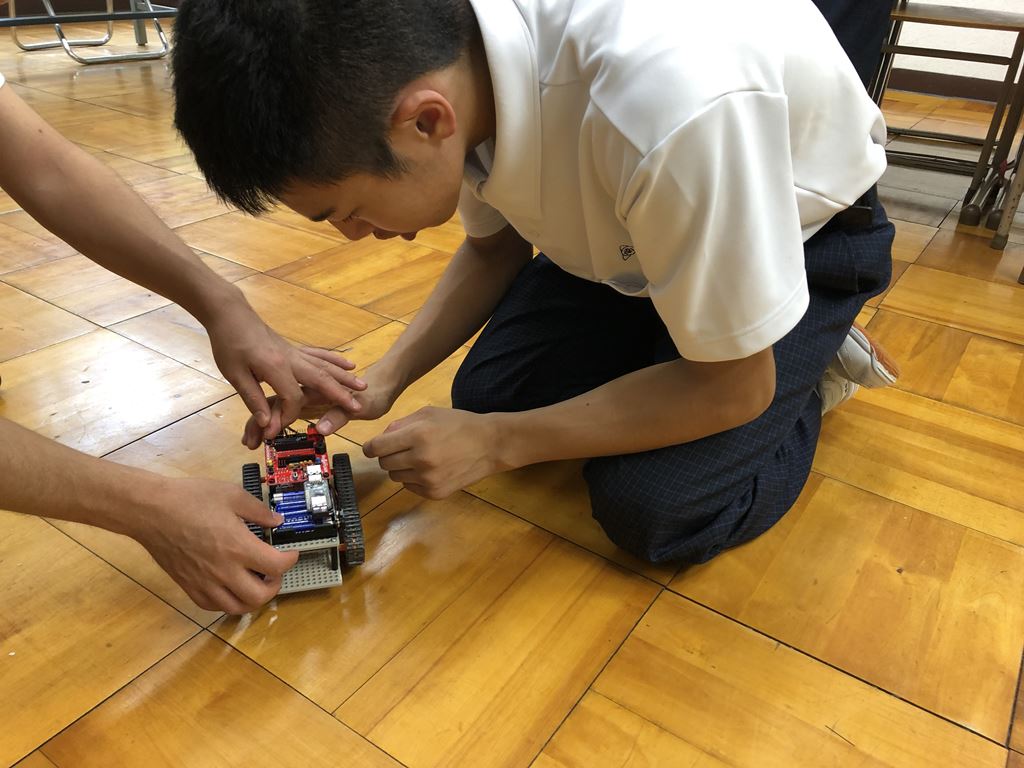
モーターの回転をテストした後、ロボット上のコンピュータからキーボード、ディスプレイを取り外し、キャタピラを取り付け、教室の床で走行テスト。
ロボットのプログラムを自動起動させる方法は、コンピュータ上のボタンを押しながら、電源スイッチをONで動きます。ボタンを押しながら、スイッチを付けるのは少しこつが必要でしたが、何度か練習をして、自動起動の方法を会得。ロボットが動き出すと、生徒たちから感嘆の声があがりました。
前進させるだけでは楽しくないので、後退用のプログラムや右・左回転のプログラムを試したり、後退の際にビープ音でバック音を付けたりするなど、プログラムを改造して楽しみました。
プリント:02_ロボットのきほんコマンド.docx
参考サイト:https://ichigojam.github.io/print/ja/index.html
・はんだんさせる IF
・おとをあやつる BEEP